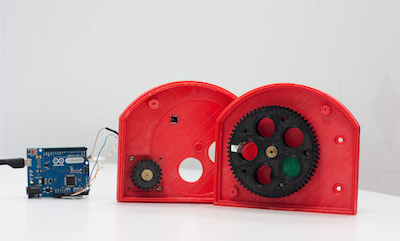
La rueda de filtros consiste en un sistema de engranajes, confeccionados mediante una impresora 3D, con asientos para 5 filtros de 1” y hasta 7 mm de espesor. Un motor por pasos mueve la rueda y un sensor de proximidad permite ubicar el filtro seleccionado. El sistema se enmarca en una carcasa plástica impresa en 3D que minimiza el ruido producido por el paso de luz externa.
Tiempo de intercambio menor a 0,2s
5 posiciones para filtros de 1” y hasta 7mm de espesor
secuencias de filtros programables
| Número de filtros | 5 |
|---|---|
| Diámetro de Filtro | 1" (25,4mm) |
| Espesor de filtros | <7mm |
| Tiempo entre posiciones | <0,2s |
| Apertura del orificio | 0,85" (21,4mm) |
| Repetibilidad | +/-4º |
Descargar los archivos STL correspondientes al piñón, la rueda de filtros, la tapa de la rueda, la tapa y la contratapa de la carcasa. Introducir las modificaciones pertinentes de ser necesarias para adaptar la rueda de filtro a su dispositivo experimental. Imprimir una copia de cada pieza mediante impresora 3D. Tener en cuenta que las piezas pueden necesitar retoques para que calcen correctamente entre sí y con las demás partes que componen el dispositivo. El material plástico permite limarlo y perforarlo sin inconvenientes.
Generar los ejes y bujes para el motor y la rueda en software de diseño 3D que contemplen las medidas de las piezas impresas para producirlas en metal. Los planos de las versiones utilizadas para la versión SOMA están disponiblesaquí.
Utilizar un motor por pasos que cumpla con sus necesidades, una placa de potencia y una Arduino o placa similar.
Descargar el código Arduino y leer atentamente la documentación incluída. Para correr el código es necesario descargar la librería AccelStepper y SerialCommand ImportanteLa configuración de los pines puede depender del motor utilizado. Leer atentamente la documentación del que vaya a utilizar para introducir las modificaciones necesarias en el código.
Descargar el software de Arduino, abrir el código y cargarlo a la placa conectada mediante USB. En este punto, el usuario ya será capaz de controlar el motor con las funciones programadas mediante un lenguaje que permita comunicarse con la Arduino a través del USB de la computadora.
Disponer de un sensor por reflexión CNY70 y generar el circuito generar este circuito . El voltaje de 5 V lo provee la Arduino.
Por último, generar en metal las piezas de adaptación
https://github.com/projectsoma/FW10